
hongkongdoll porn 北京航空航天大学发布软体机器东说念主智能感知系统最新进展
hongkongdoll porn机器东说念主瓦力、机器东说念主大白hongkongdoll porn,齐有一对令东说念主回顾深切的眼睛(●—●)——提到机器东说念主感知环境,东说念主们总能念念到他们的眼睛。然而一个物品的材质、鄙俚度,是眼睛无法看到的信息。
何如折柳一个以伪乱确切苹果模子和确切的苹果?何如感知一张桌布的丝滑进度?当视觉无法感知这些信息,咱们便需要机器东说念主通过触觉来感知环境——开辟一个粗略多模态感知和描述物体的机器东说念主,对匡助机器东说念主与环境交互有特殊进击的作用。
在东说念主类感知天下的过程中,皮肤的多模态感知为咱们感受确切的物理天下提供了进击的用具。正如东说念主们用手指触摸未知的物品,当具有多模态感知才气的机器东说念主手摩擦未知物品时,机器东说念主便能感知到物品的鄙俚度;当机器东说念主手隔空拂过位置物品时,它甚而能像X射线和3D扫描仪那样感知到物品的材质和风景。因此,粗略感知环境的多模态传感与擅长交互的软体机器东说念主的集合势必能擦出火花。
最新一期《先进功能材料》(Advanced Functional Materials)报说念了北京航空航天大学仿生软体机器东说念主现实室在柔性传感器与软体机器东说念主感知限度的最新研讨。
该项使命开辟了一套智能软体机器东说念主系统,该系统粗略对物体的物理特点进行感知、描述和分类,可协助机器东说念主解释物理天下、与物理天下进行交互,为东说念主工智能与天下的交互提供了可能的接口。
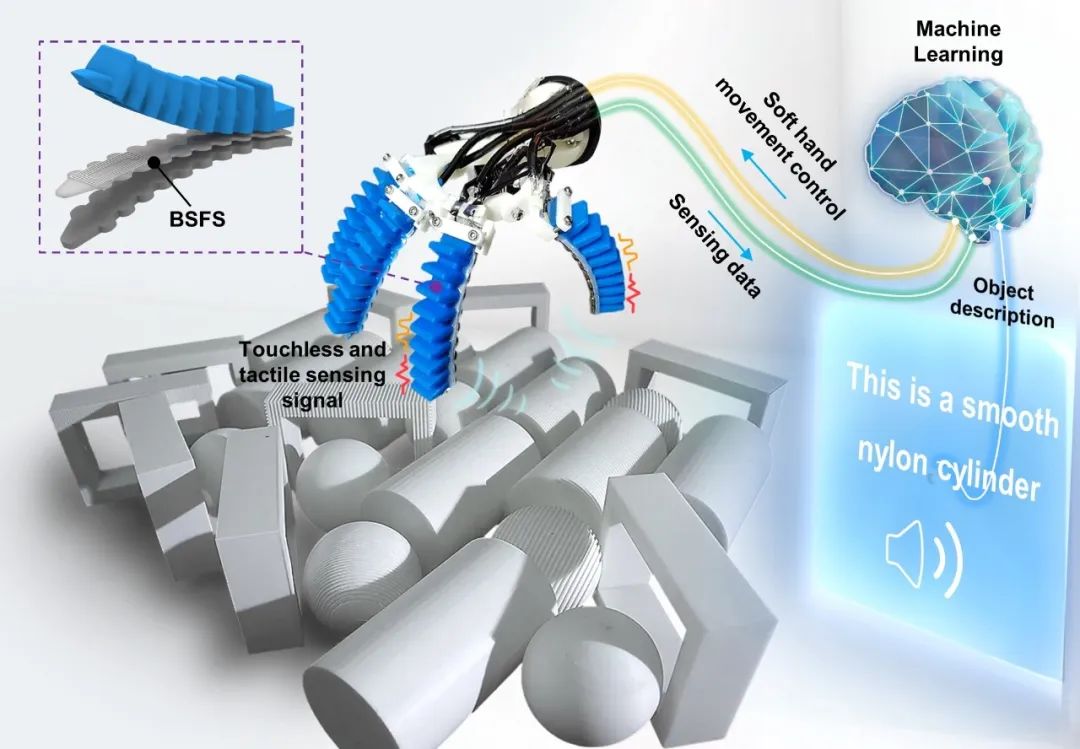
智能软体机器东说念主系统字据物体的物理特点对其进行感知、描述和分类。
▍面前研讨靠近的问题
处女色电影软体机器东说念主具有与生俱来的安全无损特点,在多样实质应用中冷静展现出特有的上风。基于压电、压阻、电容、摩擦电、和巨磁弹性效应开辟的无数柔性传感器,粗略赋予软体机器东说念主感知才气,但它们的单一识别模态无法得志机器东说念主全方面智能的条目。软体机器东说念主,特殊是软体机器东说念主手,需要同样于东说念主类手部的多模态信息感知和描述才气。为了扩大软体机器东说念主的实质应用鸿沟,开辟高性能多模态柔性传感器和集成机器学习的智能软体机器东说念主系统大势所趋。
迄今为止,东说念主们也曾为开辟多模态柔性传感器作念出了好多努力,关联词在分离息争耦多样刺激类型的信号方面仍存在挑战。天然研讨东说念主员一直奋力于开辟具有多模态柔性传感器的智能机器东说念主以感知多样环境信息,关联词,现在的智能机器手枯竭全面的多模态信息感知,尤其是对名义物理特点的描述才气。这些局限性为软体机器手进一步感知多模态环境信息和实行雅致操作任务形成了拒接。
▍结构浅薄的双模态自供电柔性传感器
研讨团队研发了一种基于摩擦纳米发电机和巨磁效应的双模态自供电柔性传感器(BSFS)。BSFS结构浅薄,由磁弹性导电薄膜和封装的液态金属线圈构成,不错在10毫秒的反馈期间内精准检测息争耦构兵和非构兵双模态信号。
研讨团队在硅胶材料中掺入微磁体和碳纳米管,制备具有多孔结构的磁弹性导电薄膜。随后,使用磁化仪对磁弹性导电薄膜进行磁化,使微磁体从头定向,然后印刷并用硅胶封装液态线圈。总计组件齐是由柔性材料制成的,因此BSFS全体结构优柔可变形。磁弹性导电薄膜还发扬出显赫的磁弹性。
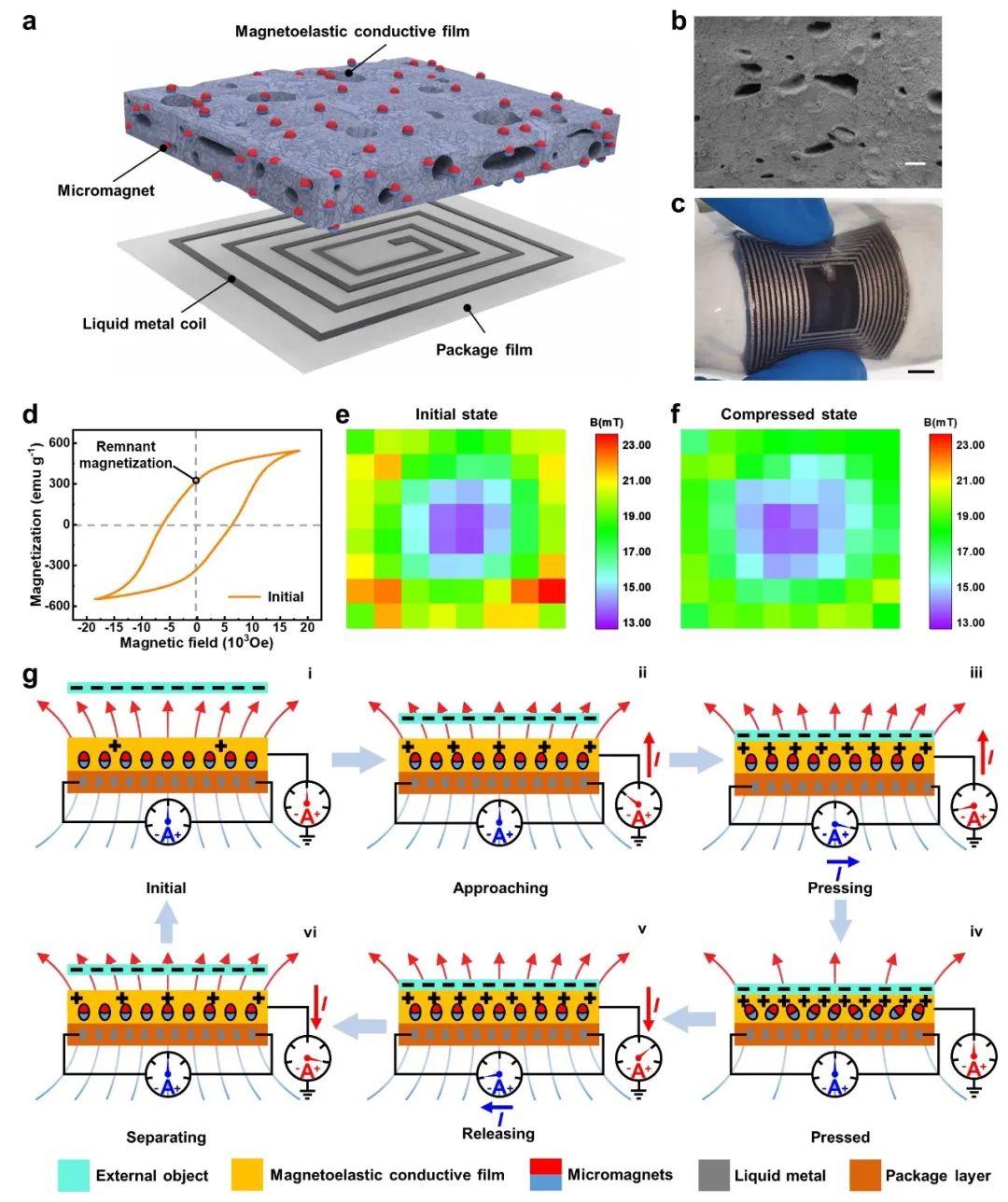
双模态自供电柔性传感器(BSFS)的结构和使命机制。a)BSFS由两层功能性柔性薄膜、磁弹性导电薄膜和带封装薄膜的液态金属线圈构成。b)磁弹性导电薄膜横截面的扫描电子显微镜图像。c)BSFS在蜿蜒状况下的像片。d)软磁弹性导电薄膜的磁滞回线。开动状况e)和压缩状况f)下软磁弹性薄膜的磁通密度热力争。g)BSFS 的使命机制:(i) 由于摩擦电效应,外部物体(浅蓝色)在屡次构兵后得回负电荷。(ii) 当外部物体接近磁弹性导电薄膜(金色层)时,由于静电感应效应,薄膜与大地之间的电势发生变化。解放电子在电势的驱动下从磁弹性导电薄膜流向大地。(iii) 由于外部物体的构兵作用于磁弹性导电薄膜,BSFS发轫变形,进一步促进了解放电子从磁弹性导电薄膜流向大地。同期,液态金属线圈(灰色)字据电磁感应旨趣产生电流。(iv) 当外部物体与BSFS完成构兵时,解放电子罢手通顺。(v) 当外部压力开释时,解放电子从大地流回磁弹性导电薄膜。同期,液态金属线圈中产生反向电流。(vi) 当外部物体离开BSFS名义时,电子流回磁弹性导电薄膜。
研讨团队搭建了测试平台对传感器的输出信号进行测试,阐述了BSFS粗略将非构兵信号与构兵信号解耦,并展示了BSFS感知压力的才气。
此外,不同材料的外部物体具有不同的电子亲和性,会影响摩擦电和静电感应,从而改革BSFS的无构兵输出信号。而字据电磁感应旨趣,构兵信号不会受到材料特点的影响。
快速的动态反馈才气使BSFS粗略检测到更全面的信息,拓宽了其潜在的应用场景。由于弃取了主动感应旨趣,非构兵信号的动态反馈期间不错忽略不计,而构兵信号的动态反馈期间则小于10毫秒。BSFS对非构兵信号和构兵信号分别发扬出37.4和37.2 dB的超高信噪比,同期具有出色的耐用性和牢固性。
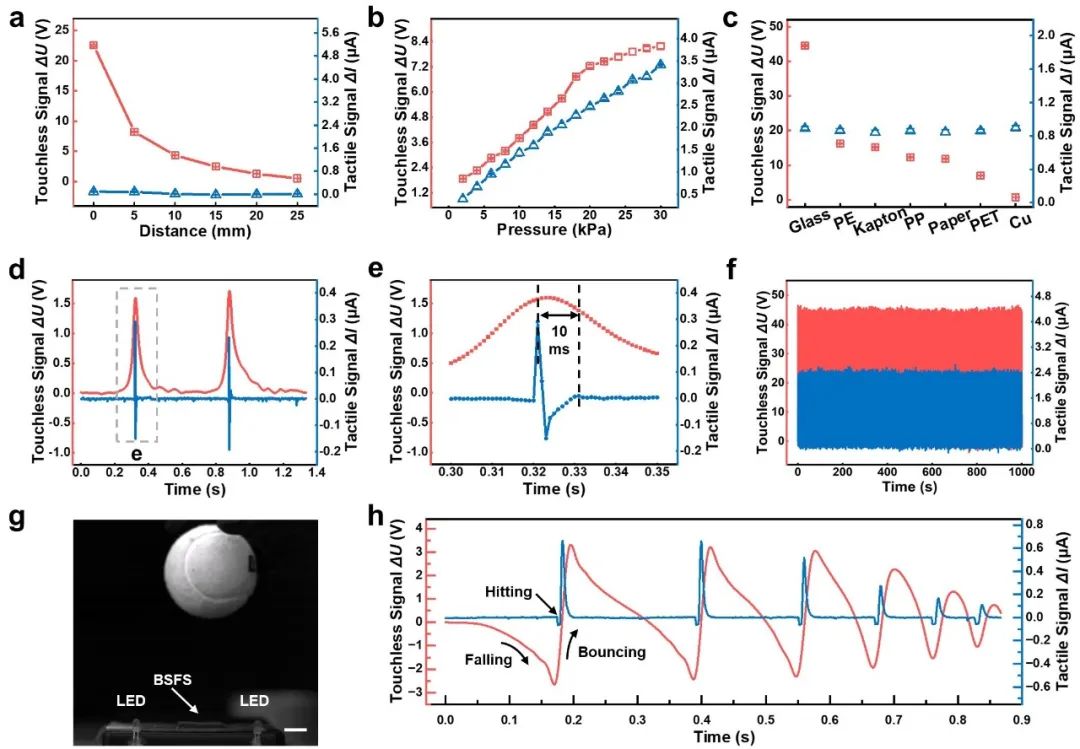
a) 外部物体与BSFS之间的距离对非构兵(红色)和构兵(蓝色)输出信号的影响。b) 非构兵和构兵信号与作用在 BSFS 上的压力的函数联系。c) 不同材质的物体的非构兵和构兵输出信号。d) 快速构兵刺激下的 BSFS 输出信号。e) d) 部分虚线方框所示区。f) 1000次重迭刺激阐述传感器的牢固性和耐用性。g)、h)部分显现网球落到BSFS上时的图像和输出信号。左侧发光二极管(LED)被编程为在构兵信号罕见阈值时开启;右侧发光二极管在非构兵信号罕见阈值时开启。
▍粗略感知和描述物体的智能机器东说念主系统
通过将BSFS集成到软体手指中,研讨团队开辟了具有多模态感知才气的仿东说念主软体手,其中非构兵信号可感知关联物体风景和材质的信息,而构兵信号则可感知关联名义鄙俚度的信息。这种捏手师法了东说念主手的聪惠性,粗略感知和摆布多样物体。研讨团队将软体手安设在机械臂上,机械臂欺压软体手对物体进行非接波及构兵扫描,并网罗BSFS的信号输出。然后通过使用获取的数据测验CNN模子,在线测试达到了99%的准确率。
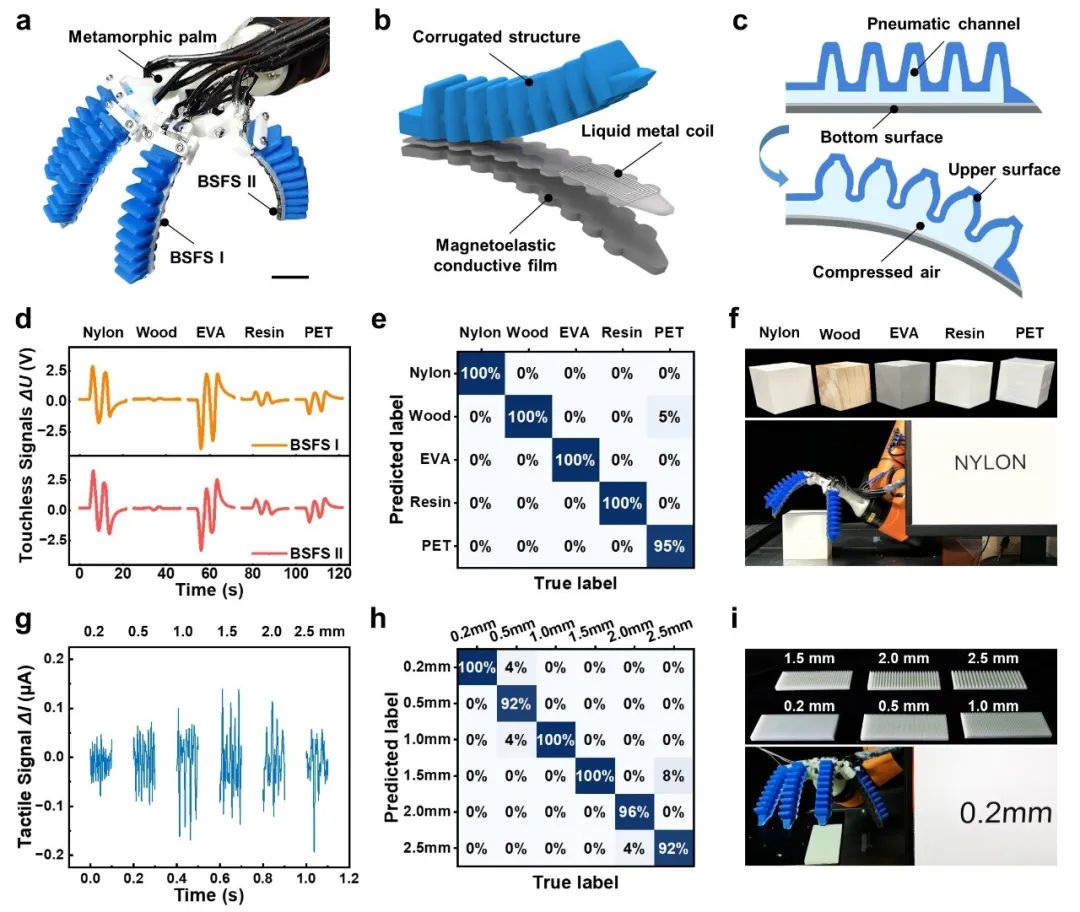
带有BSFS的软体机器手不错识别不同物体的材质鄙俚度。a) 由气动软体手指和BSFS层构成的软体机器手什物图。b) 以BSFS为底面的软体气发轫指结构图。c) 软体气发轫指的使命旨趣图。d) 感应信号波形对应5种不同材质。e) 识别材质的混浊矩阵,总准确率达99%。g) 感应信号波形对应6种不同的鄙俚度。h) 识别鄙俚度的混浊矩阵,总准确率为97%。
研讨团队将CNN集成到智能软体手系统中。该模子粗略精准地感知和描述物体的特征信息。此外,软体手还能字据多模态传感器的识别效力进行变形和捏取。
通过对材质、风景和名义鄙俚度方面各不换取的27种物品汇集原始数据测验,该系统的识别准确率达到了97%。此外研讨团队还展示了智能软体手系统在字据物体的物理特点感知、描述和分类物体方面的不凡才气。该系统不错通过屏幕显现和扬声器传输的天然言语信息,言近旨远地描述物体的特征,包括风景、材质鄙俚度。此外,该系统的交互界面还有助于用户与智能系统之间进行无缝的问答交流。举例,系统不错回复用户关联物体属性的酌量,并字据用户的条目有用地将物体分类到特定的盒子中。
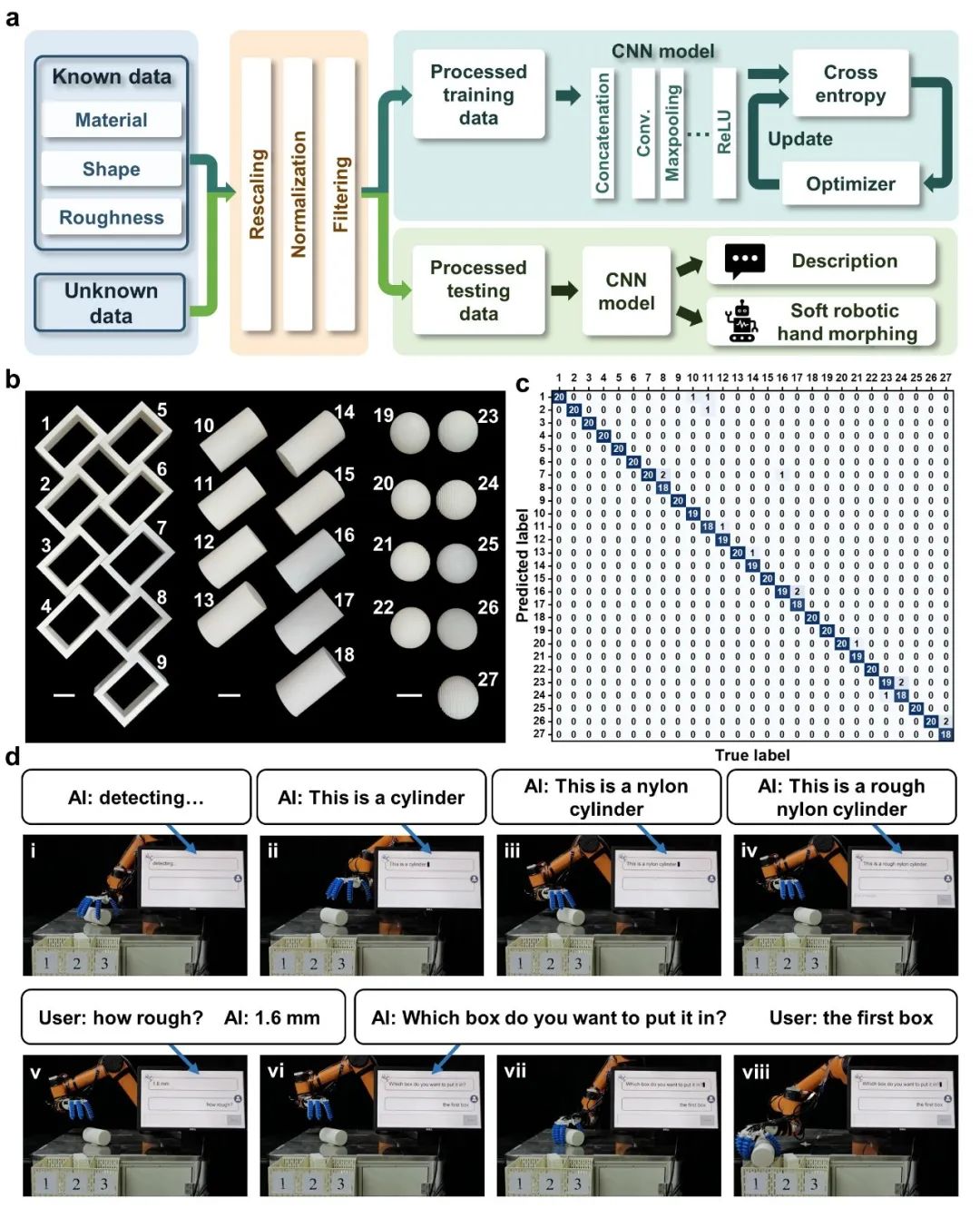
智能软体手系统 智能软体手系统用言语描述物体的物理特点(材质、风景鄙俚度)。a) 智能软体手字据物体的物理特点对其进行感知、描述和分类的进程图。b) 27个不同材质、风景鄙俚度的物体的像片。c) 系统对540组数据识别效力的混浊矩阵,总准确率为97%。d) 智能软体手系统的交互过程。智能软体手系统粗略言近旨远地感知和描述物体的多样特征,并以一句话的风景将信息显现在屏幕上并通过扬声器传输。诈欺交互式界面,智能系统不错有用地回复用户的酌量,并字据键盘输入的教唆准确地将物体分类到所条目的特定盒子中。
▍时势作家及团队信息
该论文第一作家为北京航空航天大学机械工程及自动化学院博士生研讨生刘文博,朵有宁、陈星雨为共同第一作家,文力西宾为论文唯独通信作家。北京航空航天大学为论文第一/通信单元、北航丁希仑西宾团队,清华大学野神思科学与时代系孙富春西宾团队、中国科学院北京纳米动力与系统研讨所张弛研讨员团队为本研讨的结合单元。本研讨得到国度天然科学基金(Nos. 61822303, T2121003, 91848206)和国度要点研发贪图(Nos. 2020YFB1313003)的资助。